|
Haoxiang Ma I'm a PhD student in Beihang University where I focus on 6-DoF Grasping and Robotic Manipulation. |

|
ResearchI'm interested in robotic learning, computer vision and embodied AI. Most of my research is about inferring the grasp poses from images and point-clouds. |
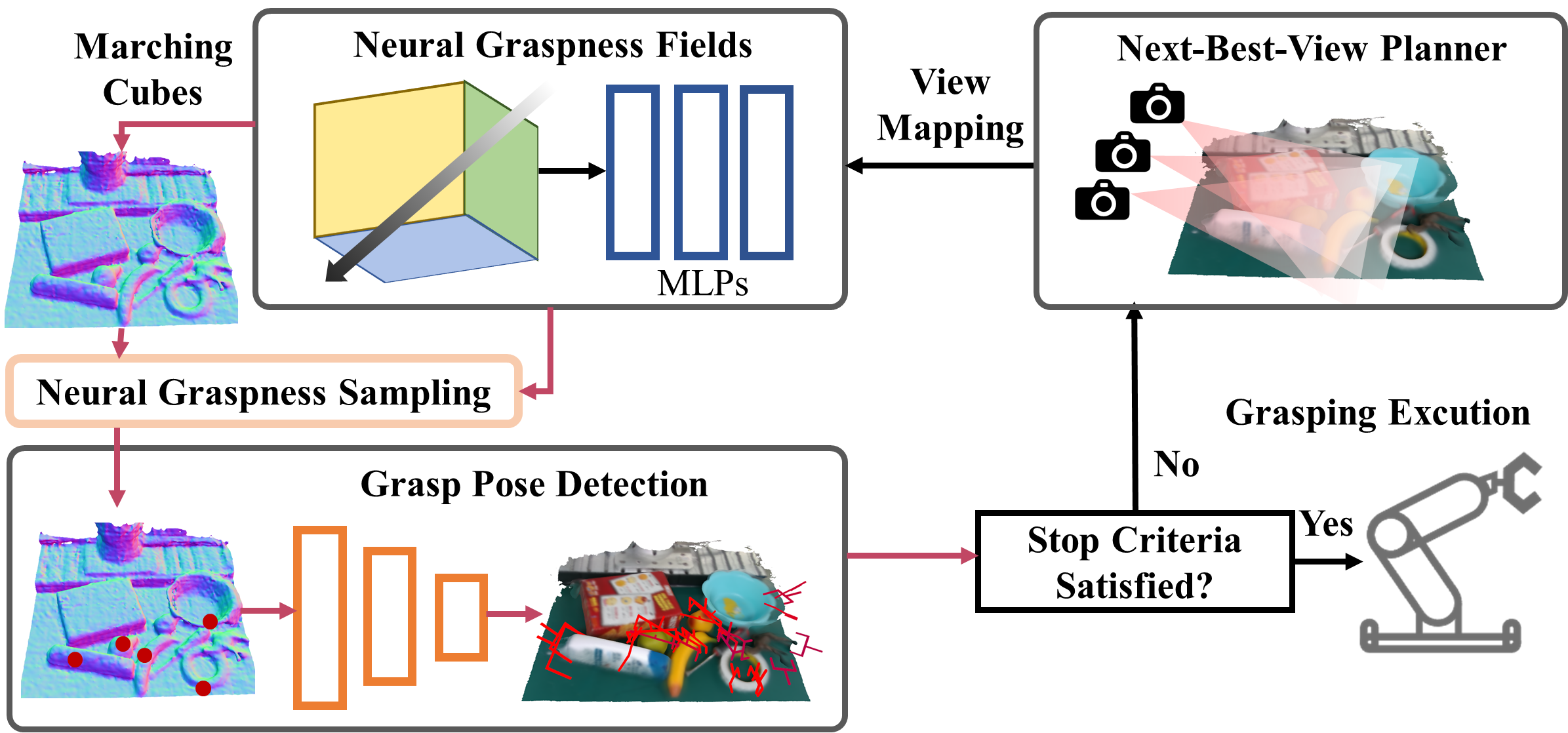 |
Active Perception for Grasp Detection via Neural Graspness Field
Haoxiang Ma, Modi Shi, Boyang Gao, Di Huang NeurIPS, 2024 paper An active perception method for grasp detection by introducing the neural graspness field, which models the grasp distribution of a scene. |
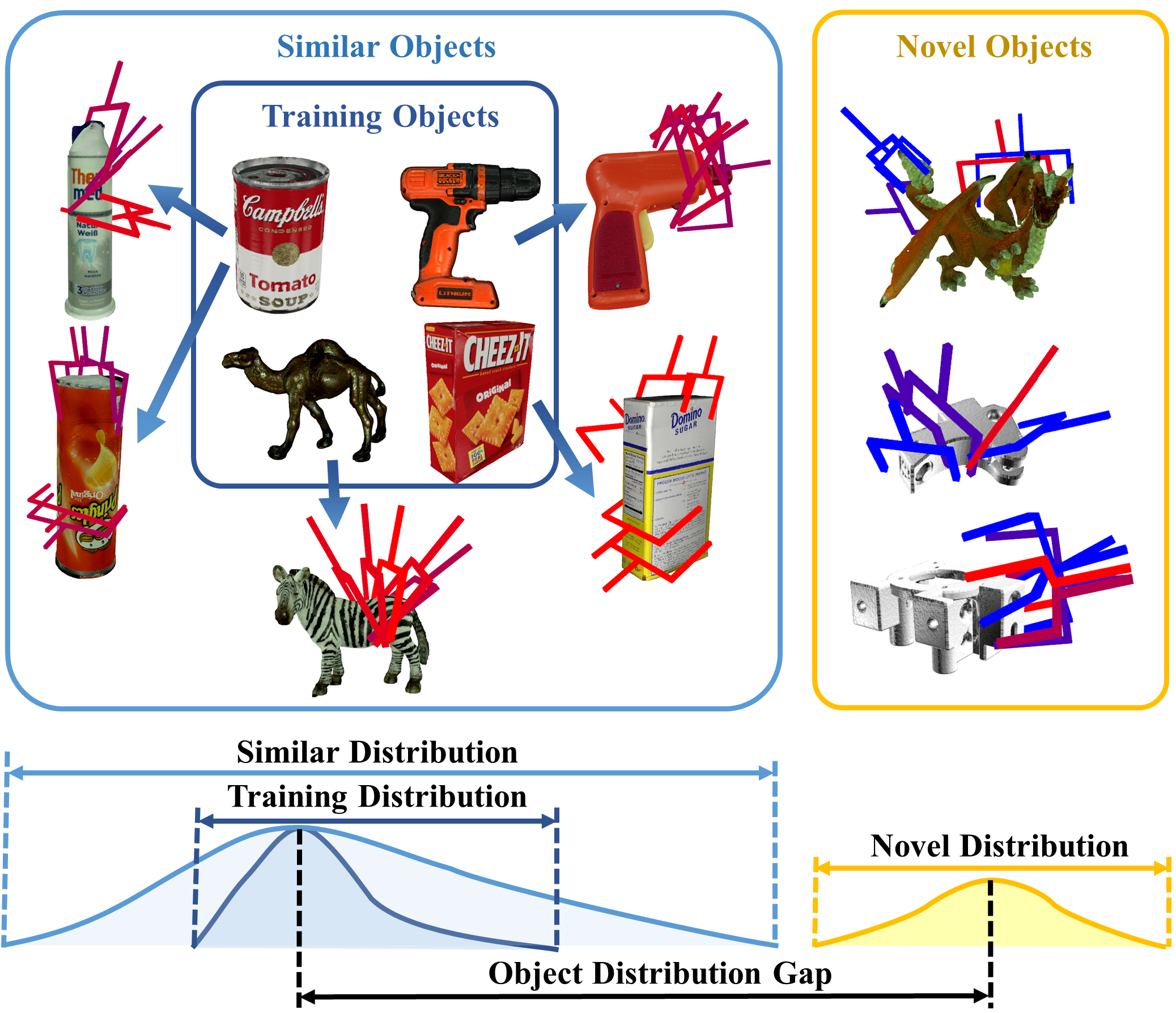 |
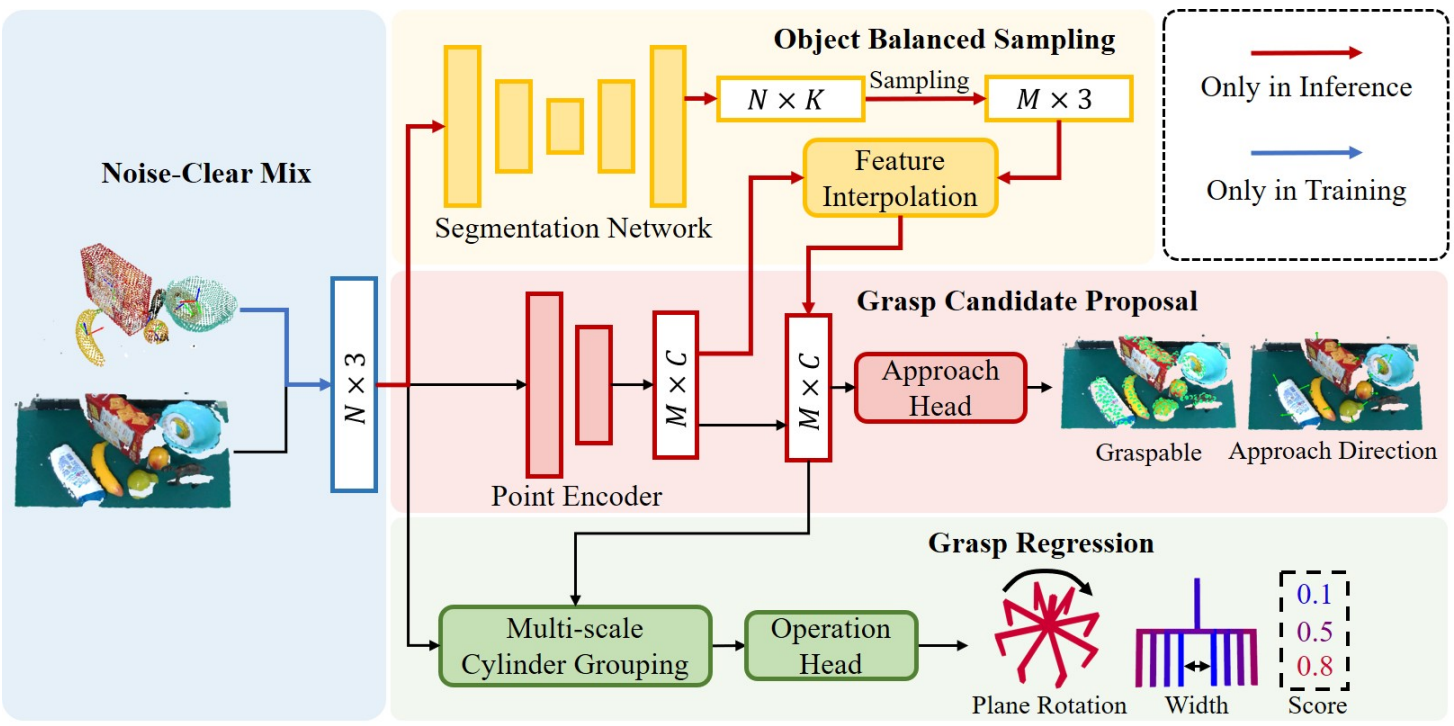
Generalizing 6-DoF Grasp Detection via Domain Prior Knowledge
Haoxiang Ma, Modi Shi, Boyang Gao, Di Huang CVPR, 2024 code / paper / video Generalizing 6-DoF grasp detection framework with domain prior knowledge of robotic grasping. |
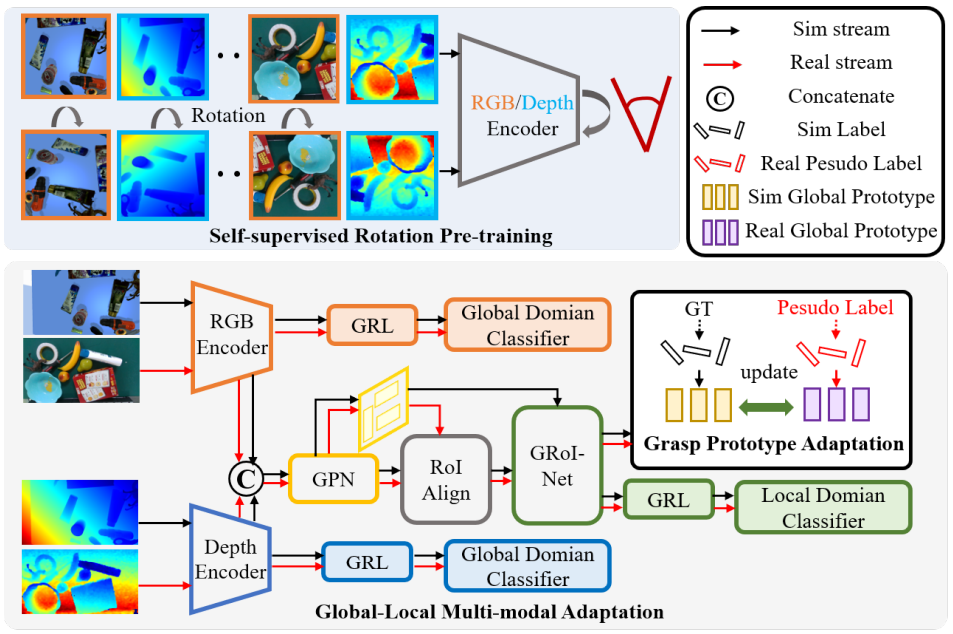 |
Sim-to-Real Grasp Detection with Global-to-Local RGB-D Adaptation
Haoxiang Ma, Ran Qin, Modi Shi, Boyang Gao, Di Huang ICRA, 2024 code / paper We present a global-to-local method to address hybrid domain gaps in RGB and depth data and insufficient multi-modal feature alignment. |
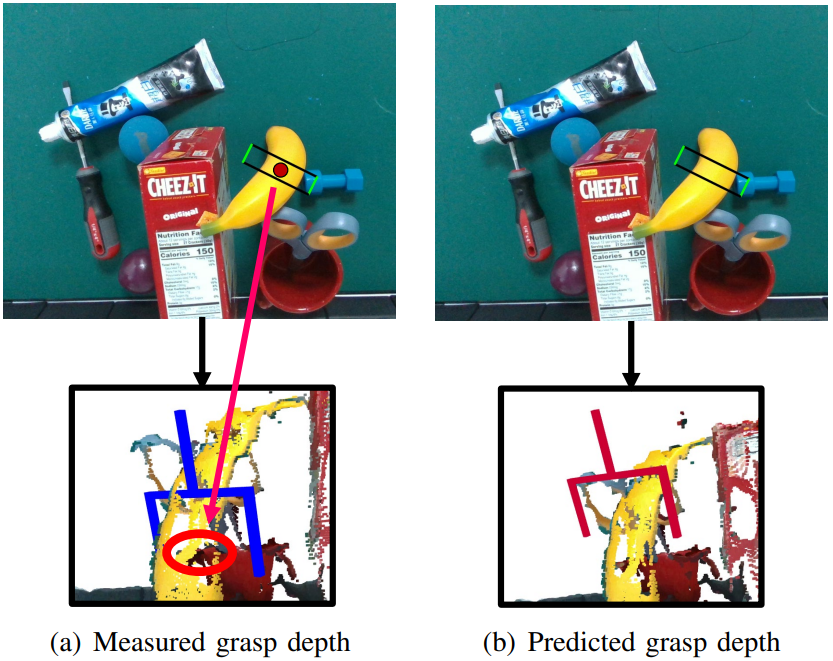 |
RGB-D Grasp Detection via Depth Guided Learning with Cross-modal Attention
Ran Qin, Haoxiang Ma, Boyang Gao, Di Huang ICRA, 2023 code / paper We build a depth guided learning framework, where both the RGB and depth images are fed and their features are combined to generate grasp proposals. |
 |
Towards scale balanced 6-dof grasp detection in cluttered scenes
Haoxiang Ma, Di Huang CoRL, 2022 code / paper / video Focus on the problem of feature learning in the presence of scale imbalance for 6-DoF grasp detection and propose a novel approach to especially address the difficulty in dealing with small-scale samples. |
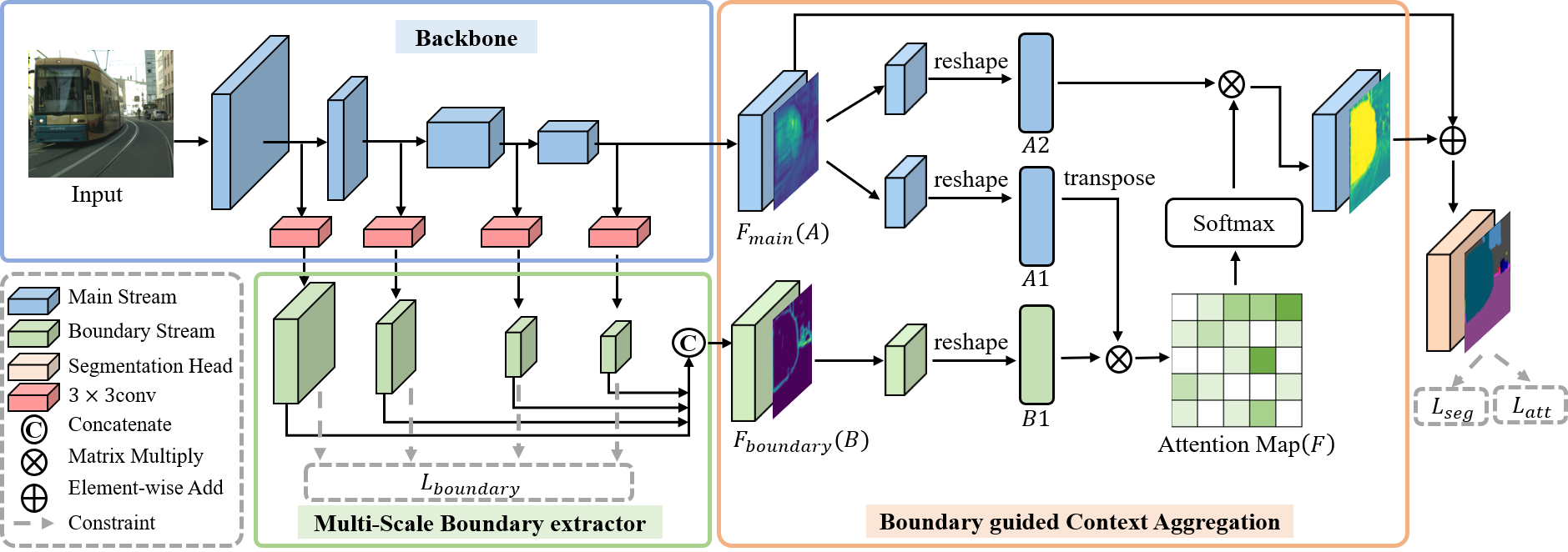 |
Boundary Guided Context Aggregation for Semantic Segmentation
Haoxiang Ma, Hongyu Yang, Di Huang BMVC, 2021 code / paper We exploit boundary as a significant guidance for context aggregation to promote the overall semantic understanding of an image. |
Miscellanea |
Academic Service |
Reviewer of CVPR, CoRL, ICLR, NeurIPS, ICML, RA-L and etc. |
|
|